


Bonjour,
L'idée est donc de pouvoir commander quelque chose (des feux d’atterrissage, de position ou autre par exemple).
Le montage est extrêmement simple, prévu pour passer 500mA max sous 12V dans mon cas.
Le fonctionnement est simple : 2 entrées (récepteur + alimentation éclairage) et une sortie.
Dans mon cas, l'avion est alimenté en 4S et la puissance de l'éclairage est alimenté via un UBec 12V de chez hobbyking.
Pour mener à bien le montage il vous suffit :
- d'un micro servo aux pignons HS (vous savez, celui dont vous n'avez jamais retrouvé la pignonerie
- d'un transistor (NPN 2N551 dans mon cas) et de trois résistances à définir (3 x 1,8kOhms dans mon cas)
1/ Premier step : démonter le servo
Pour commencer, il faut donc démonter le servo pour ne garder que l'électronique de commande, le moteur et le potentiomètre.
Le moteur est alimenté par 3 fils (noir : masse / Couleur 1 : -2,4V / Couleur 2 : +2,4V) => Vous pouvez couper les 3 fils et mettre le moteur de côté.
A ce stade, vous pouvez brancher le servo sur votre récepteur à la voie voulue et identifier quel fil sort du 2,4V lorsque l'inter choisi est basculé sur 'ON'. Repérer ce fil et mettre une petite gaine thermo sur l'autre '-2,4V) qui ne servira pas.
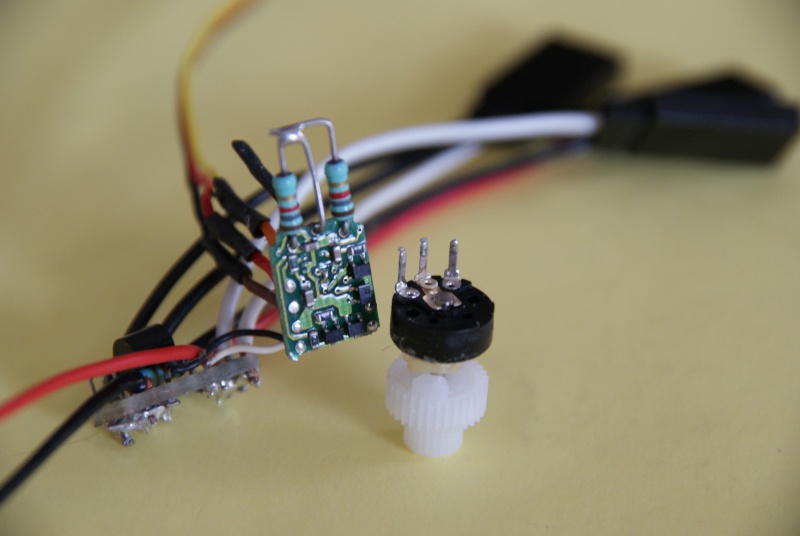
Ensuite vous pouvez dessouder le poteniomètre rotatif. Une fois celui-ci enlevé : regarder sa valeur de résistance entre la borne centrale et les 2 bornes latérales.
Pour définir les résistances à utiliser ensuite, additioner les 2 valeurs mesurées et diviser par 2. Dans mon cas, on peut remplacer le potentiomètre par 2 résistances de 1860ohms (1k8 marche trés bien) comme sur la photo ci-après :
2/ Principe de base
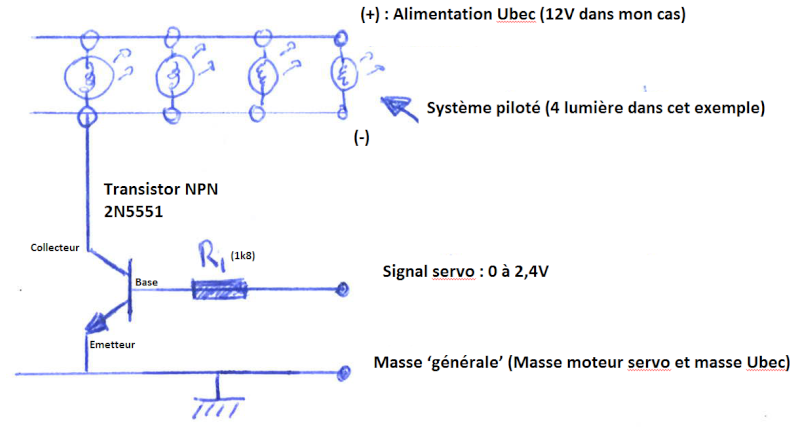
Le transistor est utilisé en commutation. Quand on bascule l'inter de la radio, on envoie du 2,4V à la base du transistor. Le courant passant, il ouvre la liaison entre la masse et le système à piloter (entre collecteur et emetteur sur le transistor).
Le petit inconvénient est qu'il y a une chute de tension de 0,6V.
Dans mon cas, il reste 11.4V des 12V de mon Ubec.
La masse du moteur est reliée à la masse de l'Ubec.
Le +12V de l'Ubec est relié au système à piloter.
Le - du système à piloter est relié à la sortie du transistor.
Pour ne pas saturer la base du transistor, il est important de positionner une résistance entre le fil pilote du servo et le transistor. Dans mon cas 1,8kOhm marche bien, mais celà peut dépendre des consommateurs => me contacter pour le calcul en attendant que je post la formule...
3/ Schéma et Montage final
Je n'ai ma encore tracé le schéma, je le posterai dés que possible.
Voilà qui est fait :
Dans mon cas j'ai fait le branchement sur une plaque à trou pour y brancher 3 sortie et tout planquer dans une gaine thermo.
Voilà à quoi ça ressemble une fois fini, avant de tout mettre sous gaine :
On voit bien le fil 'vert' volant qui correspondait au -2,4V inutilisé ici.
Sur mon montage, et comme je l'ai dit plus haut, j'ai multiplié les sorties (les fils rouges et blancs sont le +12V). Les fils rouge et noir venant de la droite sont l'arrivée de +12V issue de l'Ubec. On voit également trés bien le pilotage issu du servo (fil noir et blanc trés fins) :
Un montage en 'fil volant' est tout à fait réalisable !
Dernière astuce : pour me fournir en composants, je passe (par correspondance) par le site de Besançon Microprocessor : service rapide et port très réduits !
Bon câblages,
Damien
L'idée est donc de pouvoir commander quelque chose (des feux d’atterrissage, de position ou autre par exemple).
Le montage est extrêmement simple, prévu pour passer 500mA max sous 12V dans mon cas.
Le fonctionnement est simple : 2 entrées (récepteur + alimentation éclairage) et une sortie.
Dans mon cas, l'avion est alimenté en 4S et la puissance de l'éclairage est alimenté via un UBec 12V de chez hobbyking.
Pour mener à bien le montage il vous suffit :
- d'un micro servo aux pignons HS (vous savez, celui dont vous n'avez jamais retrouvé la pignonerie
- d'un transistor (NPN 2N551 dans mon cas) et de trois résistances à définir (3 x 1,8kOhms dans mon cas)
1/ Premier step : démonter le servo
Pour commencer, il faut donc démonter le servo pour ne garder que l'électronique de commande, le moteur et le potentiomètre.
Le moteur est alimenté par 3 fils (noir : masse / Couleur 1 : -2,4V / Couleur 2 : +2,4V) => Vous pouvez couper les 3 fils et mettre le moteur de côté.
A ce stade, vous pouvez brancher le servo sur votre récepteur à la voie voulue et identifier quel fil sort du 2,4V lorsque l'inter choisi est basculé sur 'ON'. Repérer ce fil et mettre une petite gaine thermo sur l'autre '-2,4V) qui ne servira pas.
Ensuite vous pouvez dessouder le poteniomètre rotatif. Une fois celui-ci enlevé : regarder sa valeur de résistance entre la borne centrale et les 2 bornes latérales.
Pour définir les résistances à utiliser ensuite, additioner les 2 valeurs mesurées et diviser par 2. Dans mon cas, on peut remplacer le potentiomètre par 2 résistances de 1860ohms (1k8 marche trés bien) comme sur la photo ci-après :
2/ Principe de base
Le transistor est utilisé en commutation. Quand on bascule l'inter de la radio, on envoie du 2,4V à la base du transistor. Le courant passant, il ouvre la liaison entre la masse et le système à piloter (entre collecteur et emetteur sur le transistor).
Le petit inconvénient est qu'il y a une chute de tension de 0,6V.
Dans mon cas, il reste 11.4V des 12V de mon Ubec.
La masse du moteur est reliée à la masse de l'Ubec.
Le +12V de l'Ubec est relié au système à piloter.
Le - du système à piloter est relié à la sortie du transistor.
Pour ne pas saturer la base du transistor, il est important de positionner une résistance entre le fil pilote du servo et le transistor. Dans mon cas 1,8kOhm marche bien, mais celà peut dépendre des consommateurs => me contacter pour le calcul en attendant que je post la formule...
3/ Schéma et Montage final
Je n'ai ma encore tracé le schéma, je le posterai dés que possible.
Voilà qui est fait :
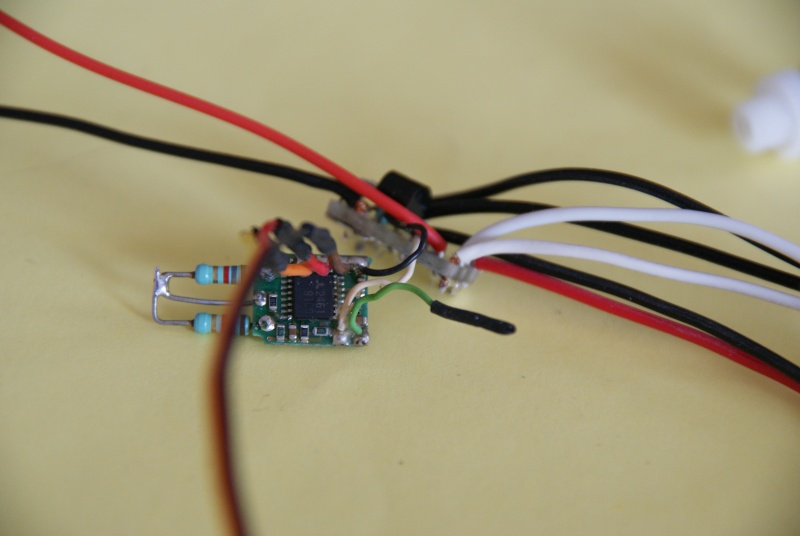
Dans mon cas j'ai fait le branchement sur une plaque à trou pour y brancher 3 sortie et tout planquer dans une gaine thermo.
Voilà à quoi ça ressemble une fois fini, avant de tout mettre sous gaine :
On voit bien le fil 'vert' volant qui correspondait au -2,4V inutilisé ici.
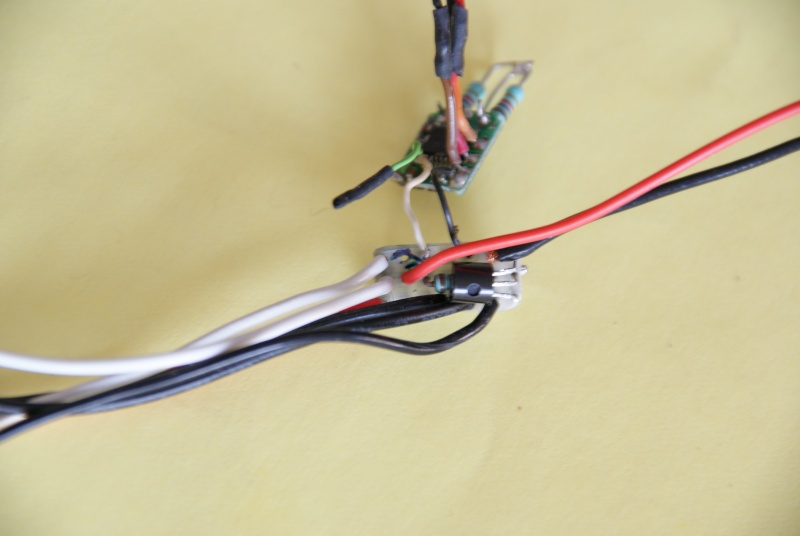
Sur mon montage, et comme je l'ai dit plus haut, j'ai multiplié les sorties (les fils rouges et blancs sont le +12V). Les fils rouge et noir venant de la droite sont l'arrivée de +12V issue de l'Ubec. On voit également trés bien le pilotage issu du servo (fil noir et blanc trés fins) :
Un montage en 'fil volant' est tout à fait réalisable !
Dernière astuce : pour me fournir en composants, je passe (par correspondance) par le site de Besançon Microprocessor : service rapide et port très réduits !
Bon câblages,
Damien
Dernière édition par Damien25 le Lun 8 Avr 2013 - 21:16, édité 2 fois


